Solution d'application Conception de circuits de communication de bus CAN — VOOHU
Solution d'application Conception de circuits de communication de bus CAN — VOOHU
Communication CAN – Réseau de zone de contrôleur
Le Controller Area Network (CAN) a été proposé par Bosch dans les années 1980. Le bus CAN utilise une communication basée sur la contention multi-maître, un arbitrage bit à bit non destructif et une transmission de signal différentielle, offrant une fiabilité élevée, des performances en temps réel et une forte capacité anti-interférence. Cela le rend largement utilisé dans l’électronique automobile, l’automatisation industrielle et d’autres domaines.
Dans le secteur automobile, le bus CAN connecte l'unité de commande du moteur (ECU), le T‑BOX, les contrôleurs de carrosserie, etc., simplifiant les faisceaux de câbles et améliorant l'intelligence du véhicule. Dans les systèmes robotiques modernes, le bus CAN est utilisé pour l'entraînement conjoint, la fusion de capteurs et la distribution de commandes de contrôle en temps réel, particulièrement adapté aux robots collaboratifs, aux châssis mobiles, aux robots humanoïdes et à d'autres scénarios nécessitant une communication multi-nœuds hautement fiable.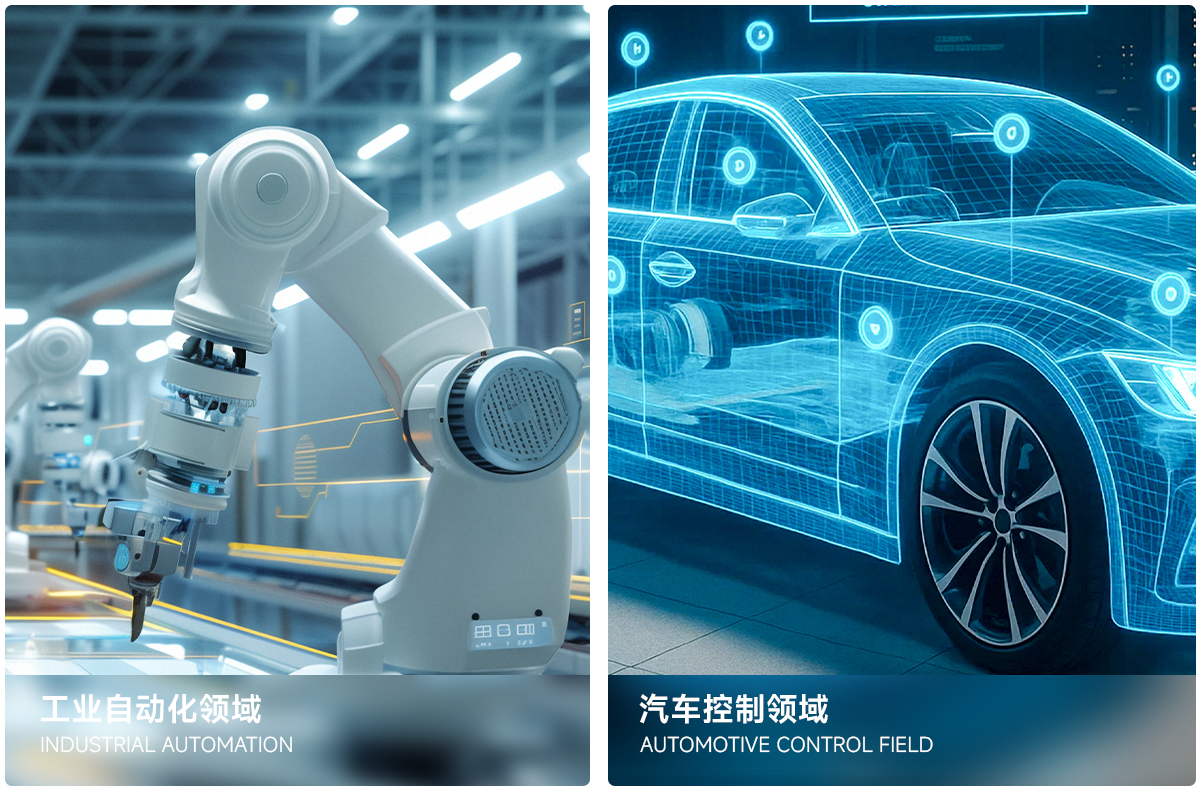
1. Émetteur-récepteur CAN
L'émetteur-récepteur CAN est la puce d'interface reliant le MCU et le bus CAN.
1.1 Les principales fonctions comprennent :
-
Changement de niveau : Convertit les signaux logiques asymétriques (TX, RX) du contrôleur en signaux de bus différentiels (CAN_H, CAN_L).
-
Conduite des autobus : Le pilote différentiel utilise une structure de sortie à drain ouvert, coopérant avec des résistances de terminaison externes pour mettre en œuvre une logique « ET filaire ».
-
Aide au traitement des trames : L'émetteur-récepteur intègre une logique d'arbitrage, une détection d'erreurs, une synchronisation de synchronisation de bits et d'autres circuits.
1.2 Rôle dans la communication CAN :
-
Implémente l'interface physique entre le contrôleur et le bus.
-
Fournit une protection contre les défauts du bus (court-circuit, surchauffe, surintensité).
-
Améliore l'immunité au bruit : les signaux différentiels suppriment les interférences en mode commun.
2. Isolateur numérique
2.1 Principe de l'appareil
Un isolateur numérique est utilisé pour isoler les signaux logiques (TX, RX) entre l'émetteur-récepteur CAN et le contrôleur, éliminant ainsi les boucles de masse et le bruit de mode commun. La technologie d'isolation capacitive est couramment utilisée, modulant les signaux à grande vitesse à travers une barrière d'isolation via des condensateurs, offrant une faible consommation d'énergie, une petite taille et des avantages de coût significatifs.
2.2 Rôle dans la communication CAN
-
Élimine les différences de potentiel de terre entre le contrôleur et le circuit du bus, évitant ainsi l'injection de bruit de commutation.
-
Améliore la fiabilité du système : un défaut du côté isolé protège le contrôleur MCU.
-
Prend en charge la communication longue distance : supprime la tension de mode commun au-delà de la plage autorisée de l'émetteur-récepteur.
Actuellement, le marché grand public intègre souvent l'émetteur-récepteur CAN et l'isolateur numérique dans un seul appareil, réduisant ainsi le coût de nomenclature et améliorant l'efficacité de la conception des PCB.
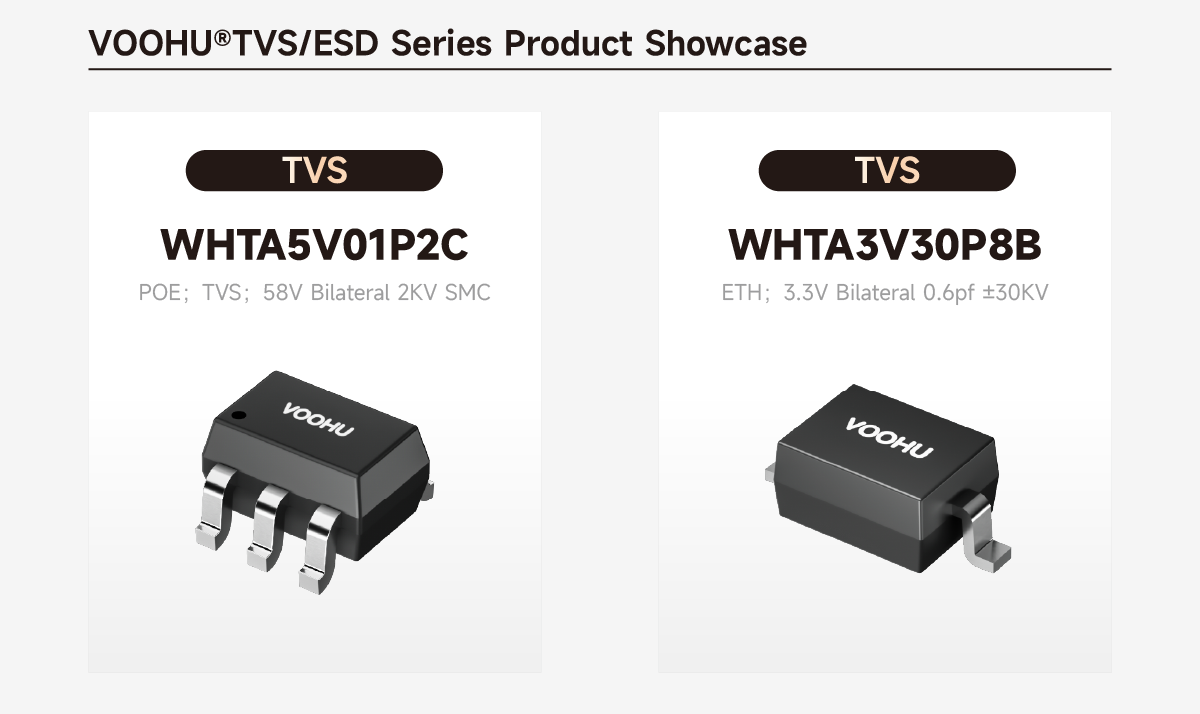
3. Téléviseurs
3.1 Rôle dans la communication CAN
-
Supprime les décharges électrostatiques (ESD) et les transitoires électriques rapides (EFT).
-
Absorbe l'énergie de surtension causée par la décharge de charge automobile ou l'induction de la foudre.
-
Protège les broches du bus de l'émetteur-récepteur contre les dommages dus aux surtensions.
Directives de mise en page :
Placez leTéléviseursaussi près que possible du connecteur de bus ou des broches de l'émetteur-récepteur, avec des traces courtes et larges. La priorité est donnée à la mise en parallèle des TVS entre CAN_H et CAN_L, suivi de chaque ligne à la terre.
4. Starter en mode commun (CMC)
4.1 Principe de l'appareil
Une self de mode commun se compose de deux bobines ayant le même nombre de tours enroulées sur le même noyau, avec des sens d'enroulement opposés. Il présente une très faible impédance aux signaux en mode différentiel et une impédance élevée aux signaux en mode commun, atténuant ainsi efficacement le courant en mode commun.
4.2 Paramètres de sélection clés
Pour les applications de bus CAN, les paramètres clés et les critères de sélection d'une self de mode commun sont les suivants :
-
Inductance de mode commun (Lcm) : plage typique 51μH ~ 100μH à 100kHz. Une inductance plus élevée permet de supprimer les interférences de mode commun basse fréquence, mais peut augmenter la taille de l'appareil et affecter négativement les signaux différentiels.
-
Impédance en mode différentiel :doit être aussi faible que possible (<10Ω) pour éviter de déformer les bords du signal CAN.
-
Résistance CC (DCR) : doit être <1Ω. Un DCR excessif réduit l'oscillation de tension en mode commun sur le bus, réduisant ainsi le nombre de nœuds connectables.
-
Courant nominal : >200 mA et doit être supérieur au courant transitoire ou continu maximum sur le bus.
-
Tension de tenue d'isolement :≥1 000 Vrms pour répondre aux exigences d'isolation du système.
4.3 Rôle dans la communication CAN
-
Supprime les interférences rayonnées en mode commun provenant d'environnements externes (par exemple, moteurs, alimentations à découpage), améliorant ainsi les performances CEM.
-
Réduit le bruit de mode commun rayonné par le câble de bus agissant comme une antenne, aidant ainsi à réussir les tests d'interférence électromagnétique (EMI).
-
Fonctionne avec des résistances de terminaison et des TVS pour construire un réseau complet d'immunité de bus.
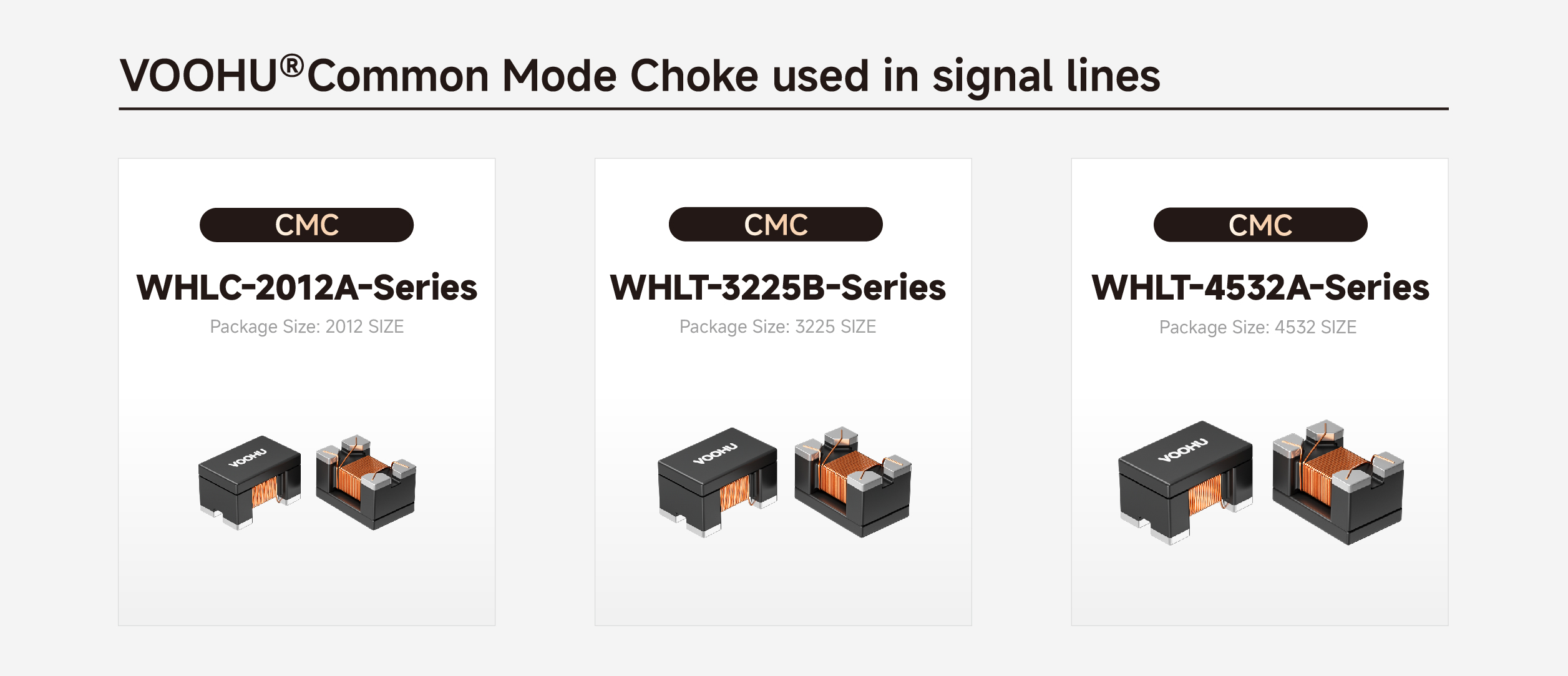
4.4 Inductances de mode commun recommandées pour la communication CAN
Selfs de mode commun de ligne de signal VOOHUsont optimisés pour le bus CAN, répondant aux exigences de faible DCR, de faible impédance en mode différentiel et de rejet élevé en mode commun.
-
Série 2012 (par exemple, WHLC‑2012A‑900T0) : 90 Ω à 100 MHz, 0,35 Ω, 300 mA – adapté aux nœuds CAN compacts.
-
Série 3225 (par exemple, WHAC‑3225B‑110U0) : 550 Ω à 100 MHz, 0,8 Ω, 300 mA – nœuds CAN industriels/automobiles généraux.
-
Série 4532 (par exemple, WHAC‑4532A‑220U0) : 1 200 Ω à 100 MHz, 1,4 Ω, 200 mA – pour les environnements à fortes interférences à proximité de moteurs et d'onduleurs.
5. Résistance de terminaison
Le bus CAN utilise un câble à paire torsadée comme support de transmission, avec une impédance caractéristique typique de 120 Ω. Lorsqu'un signal atteint l'extrémité du bus, une inadéquation d'impédance provoquera des réflexions, entraînant une sonnerie et un dépassement du signal, entraînant des erreurs binaires.
La résistance de terminaison est connectée entre CAN_H et CAN_L, avec une valeur égale à l'impédance caractéristique du câble. Il absorbe l'énergie réfléchie et supprime les ondes stationnaires. Il est principalement utilisé pour éliminer les réflexions et fournir un chemin de charge CC, garantissant l'intégrité du signal.
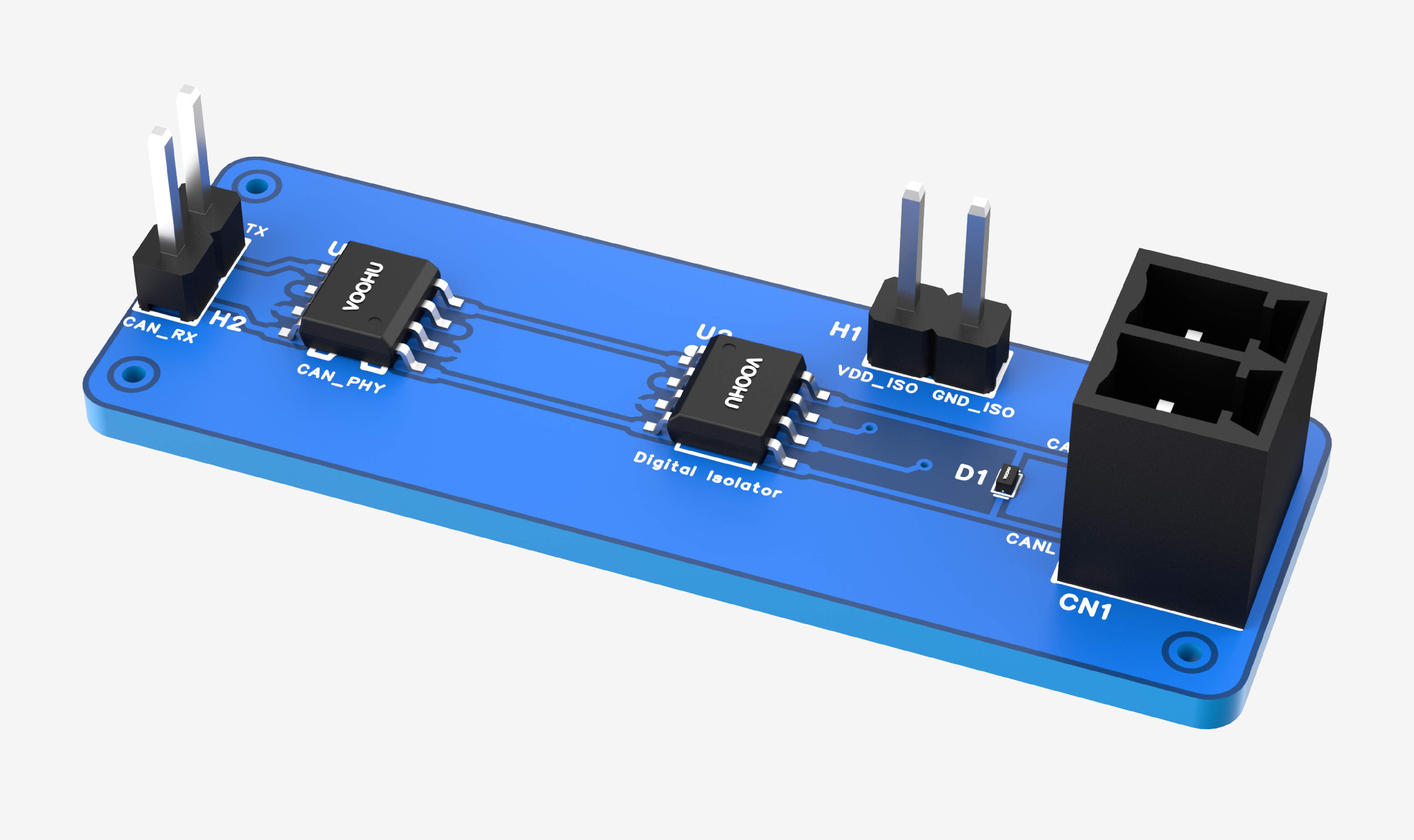
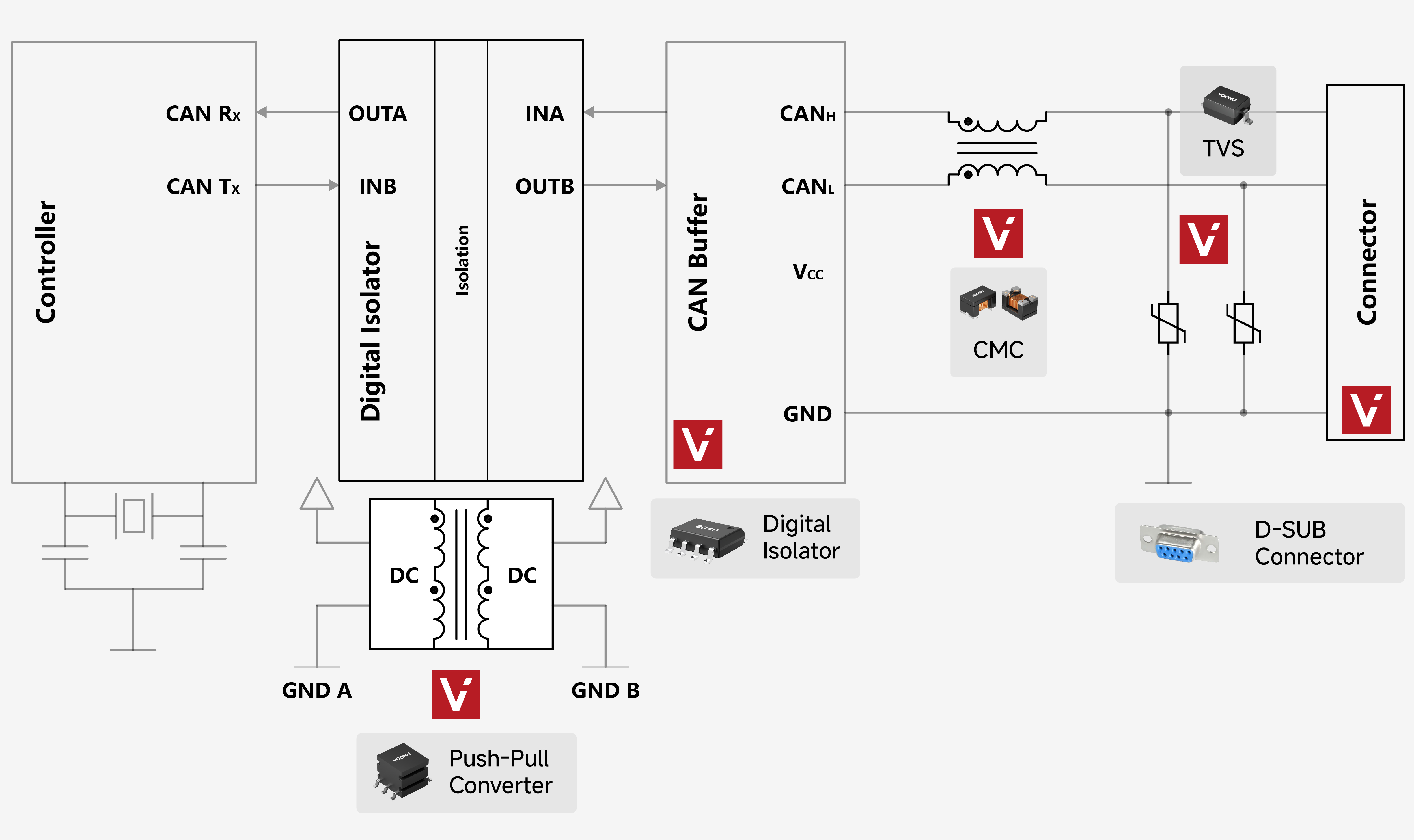
6. Conception complète du circuit
En combinant les modules ci-dessus, un circuit de communication CAN isolé à haute fiabilité typique est conçu comme suit :
Principes de mise en page :
-
Placez l'isolateur et l'émetteur-récepteur aussi près que possible pour raccourcir les traces du signal numérique du côté secondaire.
-
Gardez les traces des broches du bus de l'émetteur-récepteur jusqu'au connecteur différentiel, symétriques et de longueur égale, avec une impédance d'environ 120 Ω.
-
Côté primaire (côté contrôleur) : le système 3,3 V ou 5 V alimente directement le MCU, le primaire de l'isolateur et toute autre logique basse tension.
-
Côté secondaire (côté bus) : utilisez une alimentation isolée push-pull pour générer 5V_ISO, dédié à l'émetteur-récepteur VCC et à l'isolateur secondaire.
-
Plans de masse : GND primaire et GND_ISO secondaire sont complètement isolés. Connectez-les à la terre du châssis (ou à la terre de protection PE) via une résistance de 1 MΩ en parallèle avec un condensateur haute tension de 10 nF pour décharger l'électricité statique et fournir un chemin de bruit haute fréquence, empêchant l'accumulation de potentiel flottant.
Foire aux questions
Q1 : Pourquoi le bus CAN a-t-il besoin de résistances de terminaison ? Comment sélectionner la valeur ?
A1 : Les résistances de terminaison correspondent à l'impédance caractéristique du câble, absorbent les réflexions du signal et empêchent les sonneries et les dépassements. Le bus CAN standard utilise un câble à paire torsadée avec une impédance caractéristique de 120 Ω, la résistance de terminaison doit donc être de 120 Ω, connectée entre CAN_H et CAN_L. Généralement, une résistance de 120 Ω est placée à chaque extrémité du bus.
Q2 : Quel rôle joue une self de mode commun dans le bus CAN ? Quels paramètres doivent être pris en compte lors de la sélection ?
A2 : La self de mode commun supprime les interférences externes de mode commun (par exemple celles des moteurs, des alimentations à découpage) et le rayonnement de mode commun du câble de bus, aidant ainsi à réussir les tests CEM. Paramètres de sélection clés : inductance de mode commun (51 μH ~ 100 μH à 100 kHz), impédance de mode différentiel (<10 Ω), résistance CC (<1 Ω), courant nominal (> 200 mA), tension de tenue d'isolation (≥ 1 000 Vrms). VOOHU propose des selfs de mode commun de ligne de signal séries 2012/3225/4532 qui répondent à ces exigences.
Q3 : Comment concevoir le circuit de protection du bus CAN ? Où placer les diodes TVS ?
A3 : Le circuit de protection doit supprimer les surtensions ESD, EFT et de décharge de charge. Les diodes TVS doivent être placées d'abord entre CAN_H et CAN_L, puis de chaque ligne à la masse. Disposition : placez le téléviseur le plus près possible du connecteur de bus ou des broches de l'émetteur-récepteur, avec des traces courtes et larges.
Q4 : Pourquoi un isolateur numérique est-il nécessaire dans un circuit CAN isolé ? Comment concevoir l’alimentation isolée ?
A4 : Un isolateur numérique interrompt la boucle de masse et le bruit de mode commun entre le contrôleur et le bus, empêchant ainsi un défaut du côté isolé d'endommager le MCU du contrôleur. Pour l'alimentation isolée, un transformateur isolé push-pull peut être utilisé pour générer 5V_ISO, dédié à l'émetteur-récepteur VCC et au secondaire de l'isolateur. VOOHU propose des transformateurs push-pull tels que le WHST06D02A0, qui, avec l'isolateur, forment une solution d'isolation complète.
Q5 : Comment effectuer la co-sélection de l'émetteur-récepteur CAN, de l'isolateur et de la self de mode commun ?
A5 : Tout d'abord, sélectionnez un émetteur-récepteur CAN (par exemple, SIT1042, 1051, etc.) en fonction du débit de données et du nombre de nœuds. Si une isolation est requise, choisissez un émetteur-récepteur isolé intégré ou une solution discrète « isolateur + émetteur-récepteur ». Placez une self de mode commun (série VOOHU 3225 ou 4532) à proximité du connecteur de bus pour filtrer les interférences de mode commun et mettez en parallèle un téléviseur pour la protection contre les surtensions. Fournissez également des résistances de terminaison de 120 Ω. VOOHU peut fournir un ensemble complet de dispositifs d'interface CAN, comprenant des selfs de mode commun, des TVS, des transformateurs push-pull et des connecteurs, avec prise en charge de la conception de circuits de référence.
Depuis sa création en 2018 jusqu'à son expansion à l'étranger en 2026, VOOHU Electronics est devenu un partenaire fiable pour plus de 1 000 entreprises grâce à « une excellente qualité, des prix équitables, un service attentionné et une livraison fiable ».
Si vous recherchez également un fournisseur de composants électroniques de télécommunications qui vous fera économiser des soucis, de l'argent et des efforts, pourquoi ne pas essayer VOOHU ? Après tout, le choix de plus de 100 sociétés cotées ne peut pas être erroné.
*Choisissez VOOHU – Vraiment fiable. Ce n’est pas seulement un slogan ; c'est une réponse écrite par la confiance de plus de 1 000 clients sur 9 ans.
![[FAQ] Three FAQs for integrated RJ45 (Mag-Jack) application](/upload/image/20260724/fd7e9c7a96b2d92065dbdd6aff0b38b3.jpg)