【Application Solution】 CAN Bus Communication Circuit Design — VOOHU
CAN Communication – Controller Area Network
The Controller Area Network (CAN) was proposed by Bosch in the 1980s. The CAN bus employs multi-master contention-based communication, non-destructive bitwise arbitration, and differential signal transmission, offering high reliability, real-time performance, and strong anti-interference capability. This makes it widely used in automotive electronics, industrial automation, and other fields.
In the automotive sector, the CAN bus connects the engine control unit (ECU), T‑BOX, body controllers, etc., simplifying wiring harnesses and enhancing vehicle intelligence. In modern robotics systems, the CAN bus is used for joint drive, sensor fusion, and real-time control command distribution, especially suitable for collaborative robots, mobile chassis, humanoid robots, and other scenarios requiring multi‑node, highly reliable communication.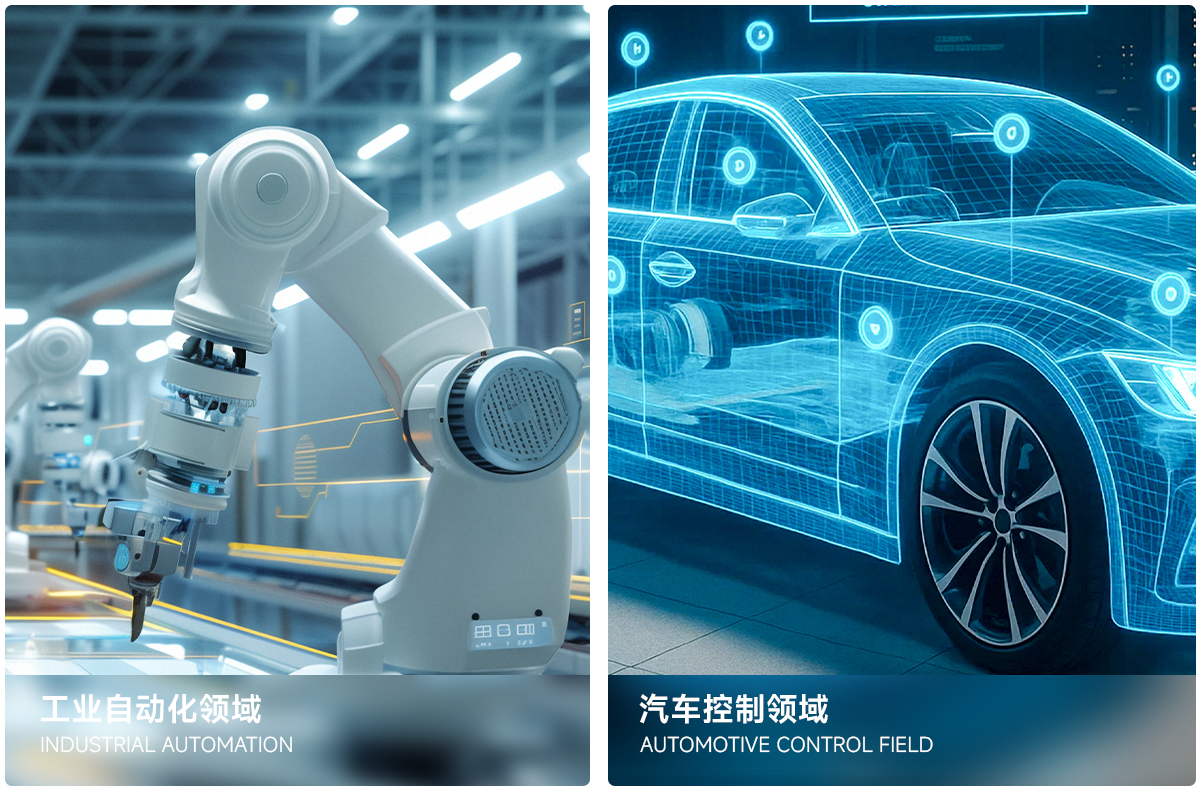
1. CAN Transceiver
The CAN transceiver is the interface chip connecting the MCU and the CAN bus.
1.1 Main functions include:
-
Level shifting: Converts the single‑ended logic signals (TX, RX) from the controller into differential bus signals (CAN_H, CAN_L).
-
Bus driving: The differential driver uses an open‑drain output structure, cooperating with external termination resistors to implement a “wired‑AND” logic.
-
Frame processing assistance: The transceiver integrates arbitration logic, error detection, bit timing synchronization, and other circuits.
1.2 Role in CAN communication:
-
Implements the physical interface between the controller and the bus.
-
Provides bus fault protection (short circuit, overtemperature, overcurrent).
-
Enhances noise immunity: differential signals suppress common‑mode interference.
2. Digital Isolator
2.1 Device principle
A digital isolator is used to isolate the logic signals (TX, RX) between the CAN transceiver and the controller, breaking ground loops and common‑mode noise. Capacitive isolation technology is commonly used, modulating high‑speed signals across an isolation barrier via capacitors, offering low power consumption, small size, and significant cost advantages.
2.2 Role in CAN communication
-
Eliminates ground potential differences between the controller and the bus circuit, avoiding injection of switching noise.
-
Improves system reliability: a fault on the isolated side protects the controller MCU.
-
Supports long‑distance communication: suppresses common‑mode voltage beyond the transceiver’s allowable range.
Currently, the mainstream market often integrates the CAN transceiver and digital isolator into a single device, reducing BOM cost and improving PCB design efficiency.
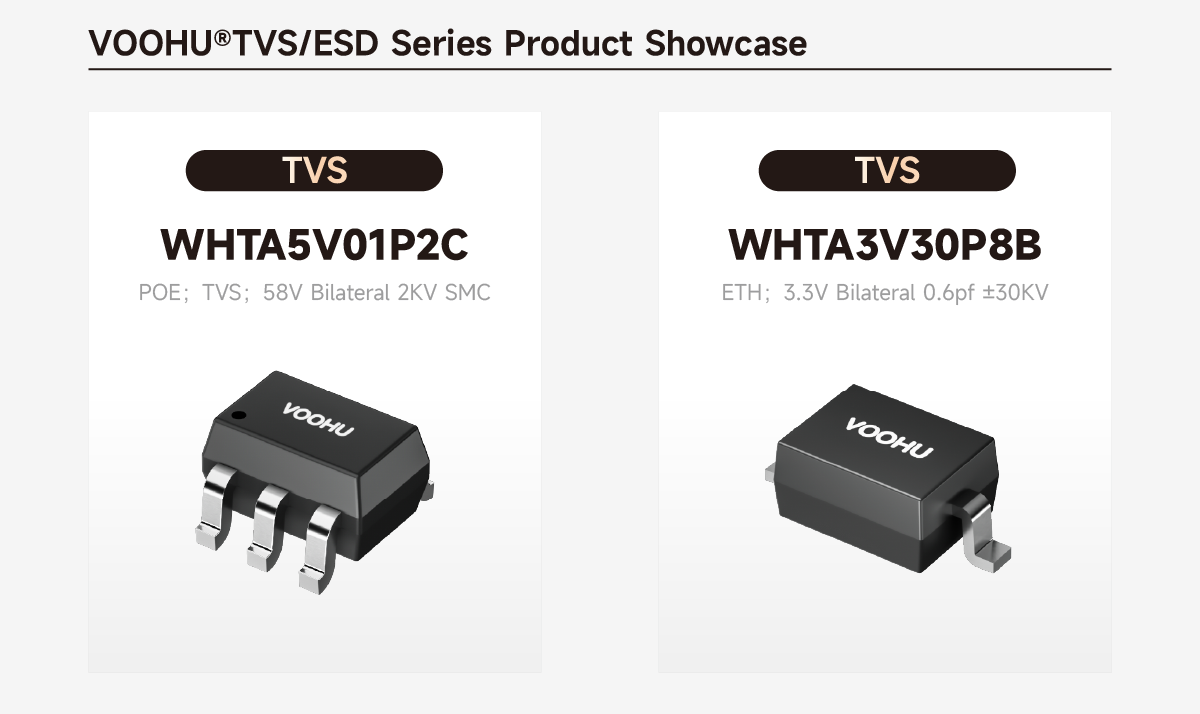
3. TVS
3.1 Role in CAN communication
-
Suppresses electrostatic discharge (ESD) and electrical fast transients (EFT).
-
Absorbs surge energy caused by automotive load dump or lightning induction.
-
Protects the transceiver’s bus pins from overvoltage damage.
Layout guidelines:
Place the TVS as close as possible to the bus connector or transceiver pins, with short and wide traces. Priority is given to paralleling the TVS between CAN_H and CAN_L, followed by each line to ground.
4. Common‑Mode Choke (CMC)
4.1 Device principle
A common‑mode choke consists of two coils with the same number of turns wound on the same core, with opposite winding directions. It presents very low impedance to differential‑mode signals and high impedance to common‑mode signals, thereby effectively attenuating common‑mode current.
4.2 Key selection parameters
For CAN bus applications, the key parameters and selection criteria for a common‑mode choke are as follows:
-
Common‑mode inductance (Lcm): typical range 51μH ~ 100μH @ 100kHz. Higher inductance helps suppress low‑frequency common‑mode interference but may increase device size and adversely affect differential signals.
-
Differential‑mode impedance: should be as low as possible (<10Ω) to avoid distorting the CAN signal edges.
-
DC resistance (DCR): must be <1Ω. Excessive DCR reduces the common‑mode voltage swing on the bus, reducing the number of connectable nodes.
-
Rated current: >200mA, and must be greater than the maximum transient or continuous current on the bus.
-
Insulation withstand voltage: ≥1000Vrms to meet system isolation requirements.
4.3 Role in CAN communication
-
Suppresses common‑mode radiated interference from external environments (e.g., motors, switching power supplies), improving EMC performance.
-
Reduces common‑mode noise radiated from the bus cable acting as an antenna, helping to pass electromagnetic interference (EMI) tests.
-
Works together with termination resistors and TVS to build a complete bus immunity network.
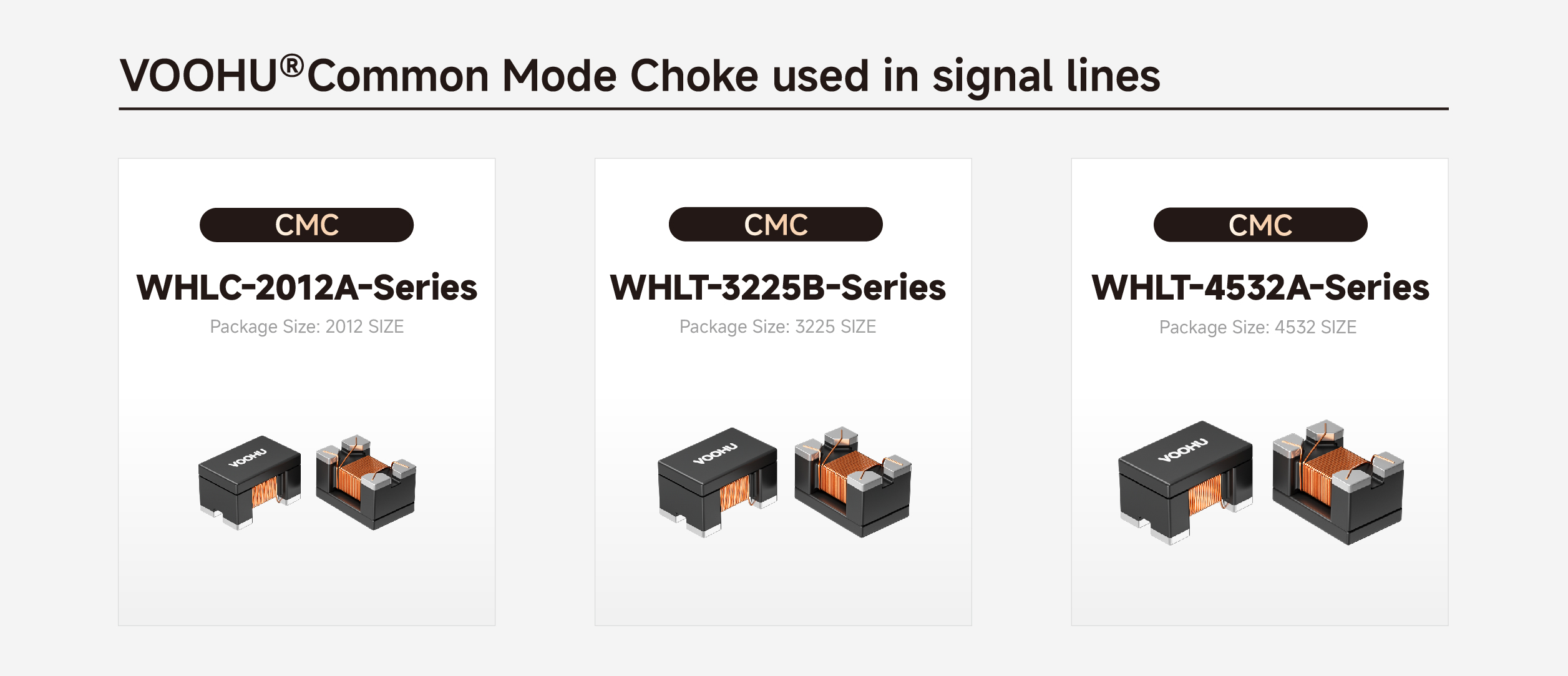
4.4 Recommended common‑mode chokes for CAN communication
VOOHU signal‑line common‑mode chokes are optimized for CAN bus, meeting requirements for low DCR, low differential‑mode impedance, and high common‑mode rejection.
-
2012 Series (e.g., WHLC‑2012A‑900T0): 90Ω @ 100MHz, 0.35Ω, 300mA – suitable for compact CAN nodes.
-
3225 Series (e.g., WHAC‑3225B‑110U0): 550Ω @ 100MHz, 0.8Ω, 300mA – general industrial/automotive CAN nodes.
-
4532 Series (e.g., WHAC‑4532A‑220U0): 1200Ω @ 100MHz, 1.4Ω, 200mA – for high‑interference environments near motors and inverters.
5. Termination Resistor
The CAN bus uses twisted‑pair cable as the transmission medium, with a characteristic impedance of typically 120Ω. When a signal reaches the end of the bus, impedance mismatch will cause reflections, leading to signal ringing and overshoot, resulting in bit errors.
The termination resistor is connected between CAN_H and CAN_L, with a value equal to the cable’s characteristic impedance. It absorbs reflected energy and suppresses standing waves. It is mainly used to eliminate reflections and provide a DC load path, ensuring signal integrity.
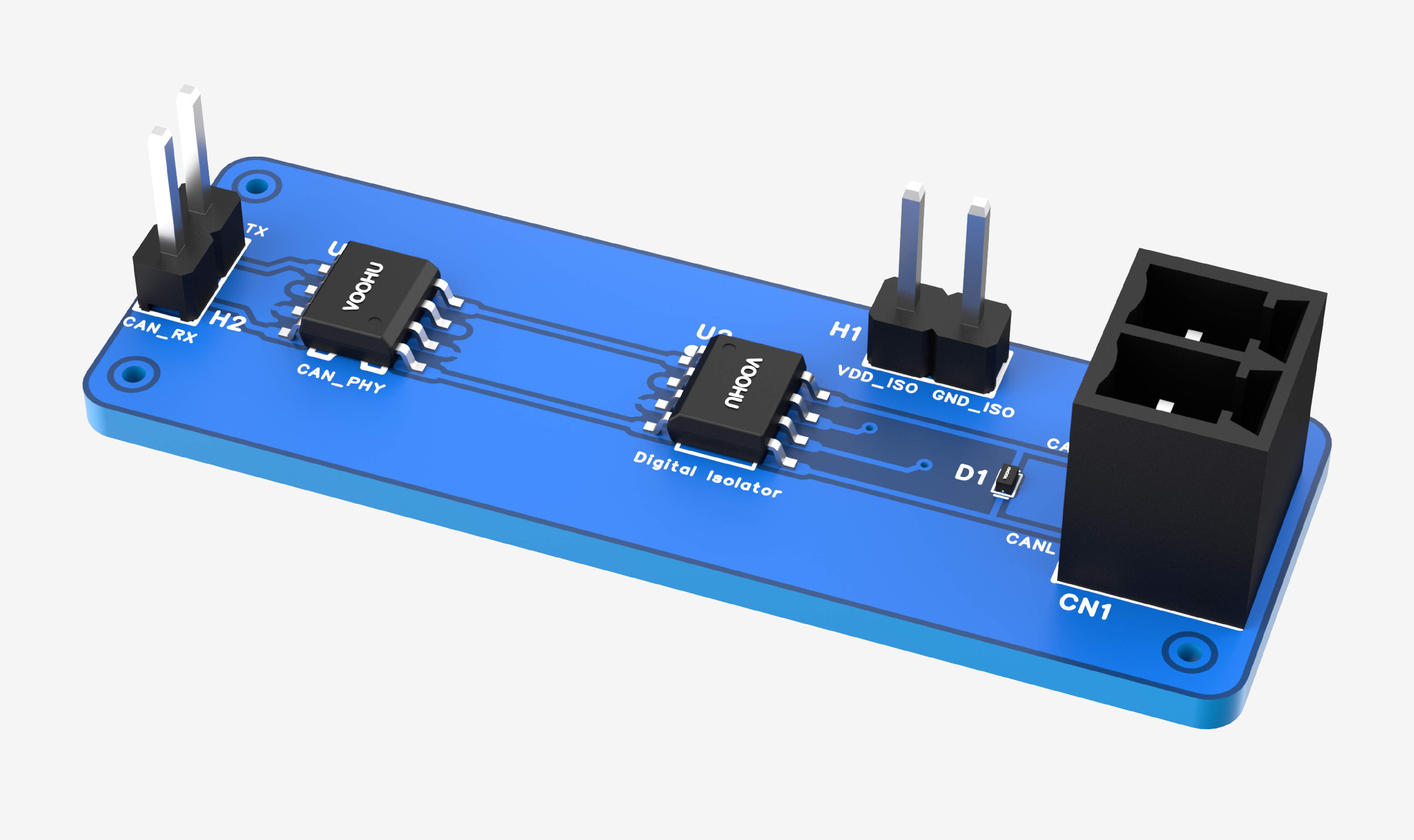
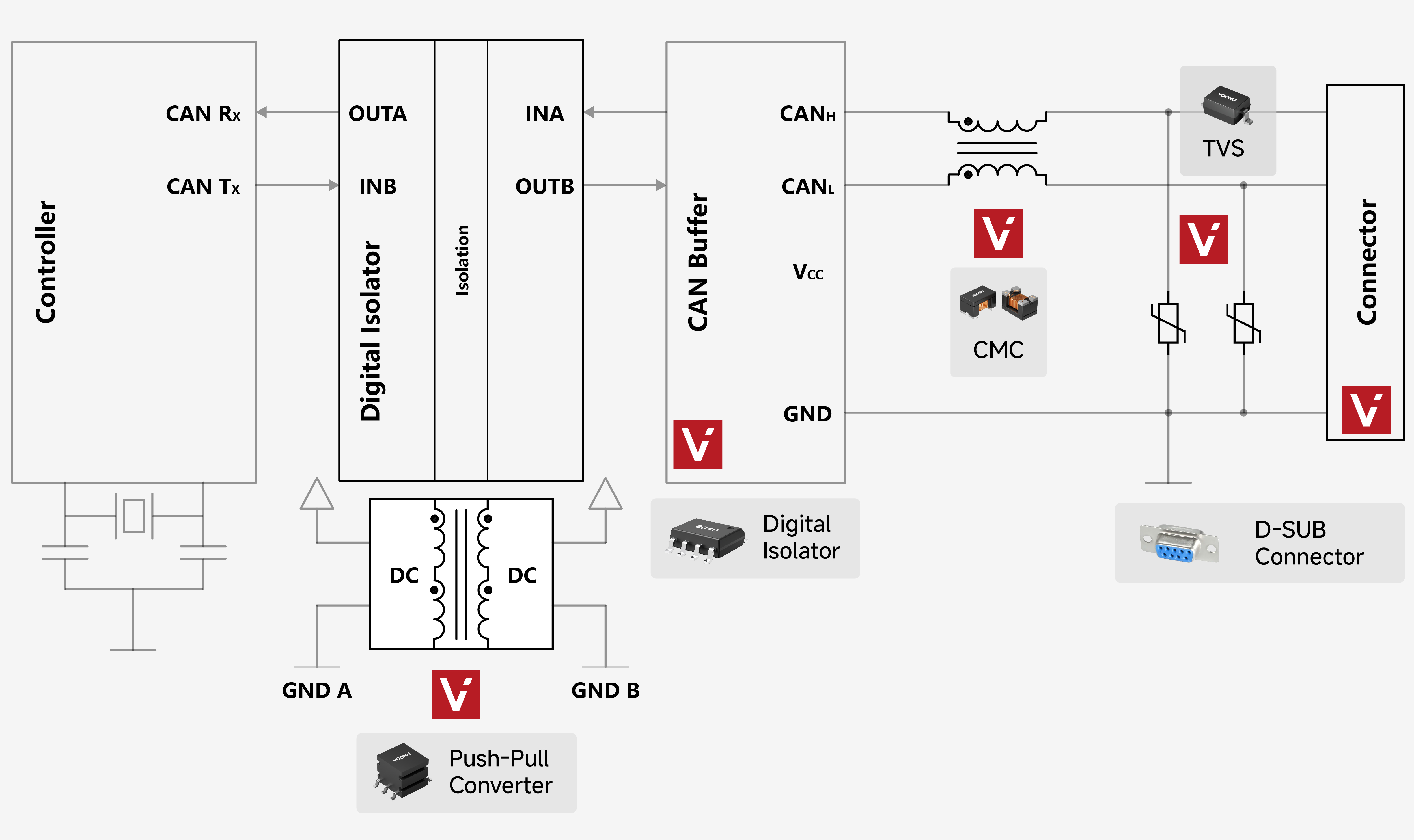
6. Complete Circuit Design
Combining the modules above, a typical high‑reliability isolated CAN communication circuit is designed as follows:
Layout principles:
-
Place the isolator and transceiver as close as possible to shorten the digital signal traces on the secondary side.
-
Keep the traces from the transceiver bus pins to the connector differential, symmetrical, and equal in length, with an impedance of approximately 120Ω.
-
Primary side (controller side): system 3.3V or 5V directly supplies the MCU, isolator primary, and other low‑voltage logic.
-
Secondary side (bus side): use a push‑pull isolated power supply to generate 5V_ISO, dedicated to the transceiver VCC and the isolator secondary.
-
Ground planes: primary GND and secondary GND_ISO are completely isolated. Connect them to chassis ground (or protective earth PE) via a 1MΩ resistor in parallel with a 10nF high‑voltage capacitor to discharge static electricity and provide a high‑frequency noise path, preventing floating potential accumulation.
Frequently Asked Questions
Q1: Why does the CAN bus need termination resistors? How to select the value?
A1: Termination resistors match the cable’s characteristic impedance, absorb signal reflections, and prevent ringing and overshoot. The standard CAN bus uses twisted‑pair cable with a characteristic impedance of 120Ω, so the termination resistor should be 120Ω, connected between CAN_H and CAN_L. Typically, one 120Ω resistor is placed at each end of the bus.
Q2: What role does a common‑mode choke play in the CAN bus? What parameters should be considered in selection?
A2: The common‑mode choke suppresses external common‑mode interference (e.g., from motors, switching power supplies) and common‑mode radiation from the bus cable, helping to pass EMC testing. Key selection parameters: common‑mode inductance (51μH~100μH @ 100kHz), differential‑mode impedance (<10Ω), DC resistance (<1Ω), rated current (>200mA), insulation withstand voltage (≥1000Vrms). VOOHU offers 2012/3225/4532 series signal‑line common‑mode chokes that meet these requirements.
Q3: How to design the CAN bus protection circuit? Where should TVS diodes be placed?
A3: The protection circuit must suppress ESD, EFT, and load‑dump surges. TVS diodes should be placed first between CAN_H and CAN_L, and then from each line to ground. Layout: place the TVS as close as possible to the bus connector or transceiver pins, with short and wide traces.
Q4: Why is a digital isolator needed in an isolated CAN circuit? How to design the isolated power supply?
A4: A digital isolator breaks the ground loop and common‑mode noise between the controller and the bus, preventing a fault on the isolated side from damaging the controller MCU. For the isolated power supply, a push‑pull isolated transformer can be used to generate 5V_ISO, dedicated to the transceiver VCC and the isolator secondary. VOOHU provides push‑pull transformers such as WHST06D02A0, which together with the isolator form a complete isolation solution.
Q5: How to perform co‑selection of the CAN transceiver, isolator, and common‑mode choke?
A5: First, select a CAN transceiver (e.g., SIT1042, 1051, etc.) based on data rate and node count. If isolation is required, choose an integrated isolated transceiver or a discrete “isolator + transceiver” solution. Place a common‑mode choke (VOOHU 3225 or 4532 series) near the bus connector to filter common‑mode interference, and parallel a TVS for surge protection. Also, provide 120Ω termination resistors. VOOHU can provide a complete CAN interface device package, including common‑mode chokes, TVS, push‑pull transformers, and connectors, with support for reference circuit design.
From its founding in 2018 to its overseas expansion in 2026, VOOHU Electronics has become a reliable partner for more than 1,000 enterprises by virtue of “excellent quality, fair pricing, attentive service, and reliable delivery.”
If you are also looking for a telecommunications electronic component supplier that saves you worry, money, and effort, why not try VOOHU? After all, the choice of more than 100 listed companies can’t be wrong.
*Choose VOOHU – Truly Reliable. That is not just a slogan; it is an answer written by the trust of 1,000+ customers over 9 years.
![[FAQ] Three FAQs for integrated RJ45 (Mag-Jack) application](/upload/image/20260724/fd7e9c7a96b2d92065dbdd6aff0b38b3.jpg)