Anwendungslösung CAN-Bus-Kommunikationsschaltungsdesign – VOOHU
CAN-Kommunikation – Controller Area Network
Das Controller Area Network (CAN) wurde in den 1980er Jahren von Bosch vorgeschlagen. Der CAN-Bus nutzt Multi-Master-Konkurrenzkommunikation, zerstörungsfreie bitweise Arbitrierung und differenzielle Signalübertragung und bietet hohe Zuverlässigkeit, Echtzeitleistung und starke Anti-Interferenz-Fähigkeit. Dadurch wird es häufig in der Automobilelektronik, der industriellen Automatisierung und anderen Bereichen eingesetzt.
Im Automobilbereich verbindet der CAN-Bus das Motorsteuergerät (ECU), die T-BOX, die Karosseriesteuergeräte usw., wodurch Kabelbäume vereinfacht und die Fahrzeugintelligenz verbessert werden. In modernen Robotersystemen wird der CAN-Bus für den gemeinsamen Antrieb, die Sensorfusion und die Verteilung von Steuerbefehlen in Echtzeit verwendet. Er eignet sich besonders für kollaborative Roboter, mobile Fahrgestelle, humanoide Roboter und andere Szenarien, die eine hochzuverlässige Kommunikation mit mehreren Knoten erfordern.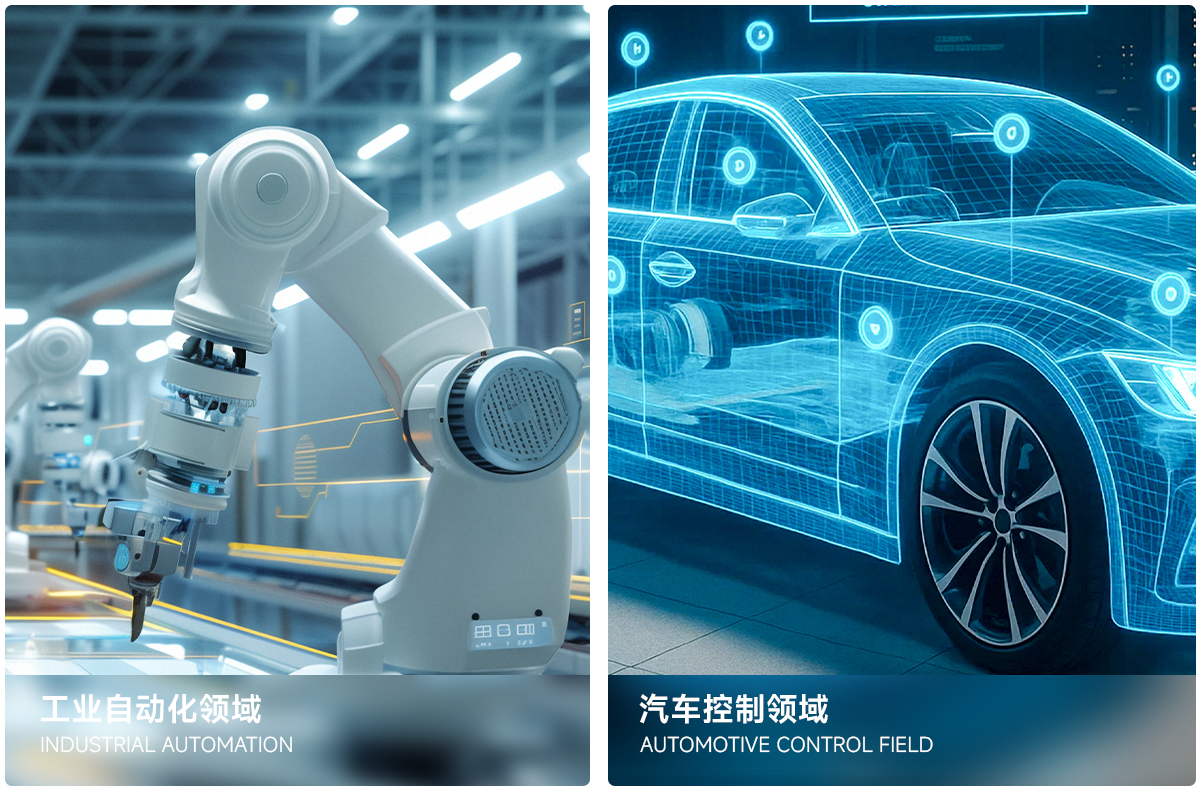
1. CAN-Transceiver
Der CAN-Transceiver ist der Schnittstellenchip, der die MCU und den CAN-Bus verbindet.
1.1 Zu den Hauptfunktionen gehören:
-
Pegelverschiebung: Wandelt die Single-Ended-Logiksignale (TX, RX) vom Controller in differenzielle Bussignale (CAN_H, CAN_L) um.
-
Busfahren: Der Differenztreiber nutzt eine Open-Drain-Ausgangsstruktur und arbeitet mit externen Abschlusswiderständen zusammen, um eine „Wired-AND“-Logik zu implementieren.
-
Unterstützung bei der Rahmenverarbeitung: Der Transceiver integriert Arbitrierungslogik, Fehlererkennung, Bit-Timing-Synchronisation und andere Schaltkreise.
1.2 Rolle bei der CAN-Kommunikation:
-
Implementiert die physische Schnittstelle zwischen dem Controller und dem Bus.
-
Bietet Busfehlerschutz (Kurzschluss, Übertemperatur, Überstrom).
-
Erhöht die Störfestigkeit: Differenzsignale unterdrücken Gleichtaktstörungen.
2. Digitaler Isolator
2.1 Geräteprinzip
Ein digitaler Isolator wird verwendet, um die Logiksignale (TX, RX) zwischen dem CAN-Transceiver und dem Controller zu isolieren und Erdschleifen und Gleichtaktstörungen zu unterbrechen. Üblicherweise wird die kapazitive Isolationstechnologie verwendet, bei der Hochgeschwindigkeitssignale mithilfe von Kondensatoren über eine Isolationsbarriere moduliert werden. Dies bietet einen geringen Stromverbrauch, eine geringe Größe und erhebliche Kostenvorteile.
2.2 Rolle in der CAN-Kommunikation
-
Eliminiert Erdpotentialunterschiede zwischen dem Controller und dem Buskreis und vermeidet so die Einspeisung von Schaltgeräuschen.
-
Verbessert die Systemzuverlässigkeit: Ein Fehler auf der isolierten Seite schützt die Controller-MCU.
-
Unterstützt Fernkommunikation: Unterdrückt Gleichtaktspannung über den zulässigen Bereich des Transceivers hinaus.
Derzeit integriert der Mainstream-Markt häufig den CAN-Transceiver und den digitalen Isolator in einem einzigen Gerät, wodurch die Stücklistenkosten gesenkt und die Effizienz des PCB-Designs verbessert werden.
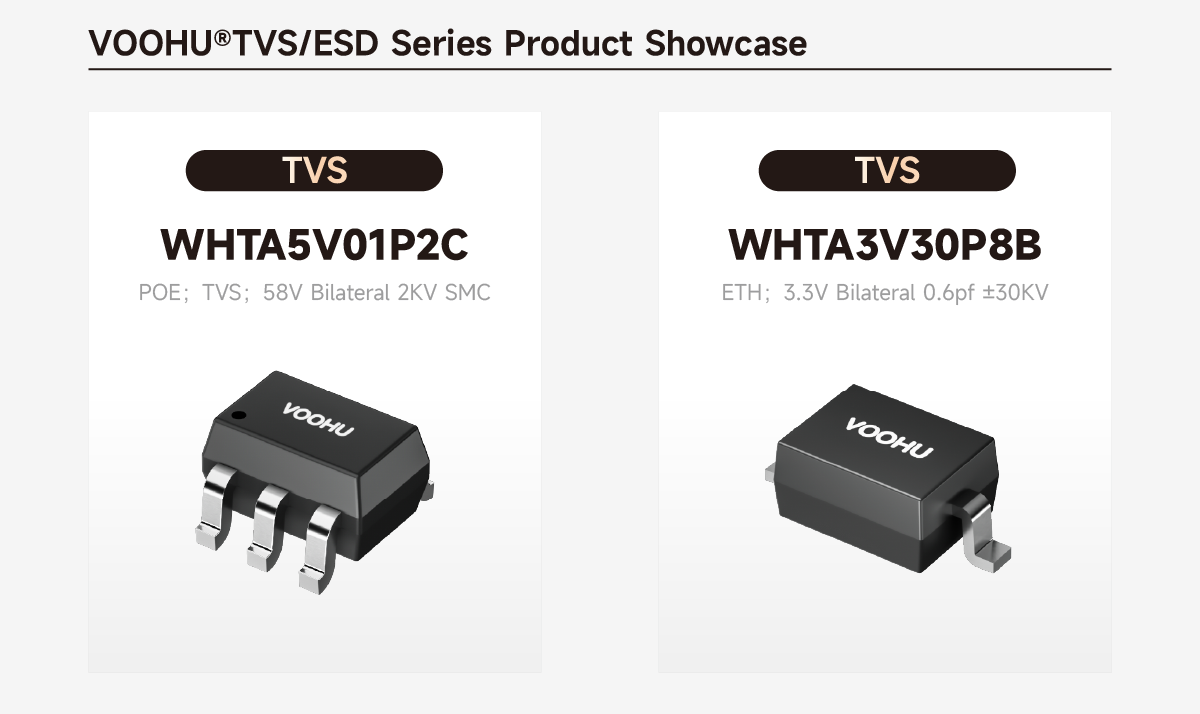
3. Fernseher
3.1 Rolle in der CAN-Kommunikation
-
Unterdrückt elektrostatische Entladung (ESD) und elektrische schnelle Transienten (EFT).
-
Absorbiert Stoßenergie, die durch Lastabwurf im Auto oder Blitzinduktion verursacht wird.
-
Schützt die Bus-Pins des Transceivers vor Schäden durch Überspannung.
Layoutrichtlinien:
Platzieren Sie dieFernseherso nah wie möglich an den Busstecker- oder Transceiver-Pins, mit kurzen und breiten Leiterbahnen. Vorrang hat die Parallelschaltung des TVS zwischen CAN_H und CAN_L, gefolgt von jeder Leitung zur Erde.
4. Gleichtaktdrossel (CMC)
4.1 Geräteprinzip
Eine Gleichtaktdrossel besteht aus zwei Spulen mit gleicher Windungszahl, die mit entgegengesetzter Wicklungsrichtung auf denselben Kern gewickelt sind. Es bietet eine sehr niedrige Impedanz gegenüber Gegentaktsignalen und eine hohe Impedanz gegenüber Gleichtaktsignalen und dämpft dadurch effektiv den Gleichtaktstrom.
4.2 Wichtige Auswahlparameter
Für CAN-Bus-Anwendungen sind die wichtigsten Parameter und Auswahlkriterien für eine Gleichtaktdrossel wie folgt:
-
Gleichtaktinduktivität (Lcm): typischer Bereich 51μH ~ 100μH bei 100kHz. Eine höhere Induktivität trägt dazu bei, niederfrequente Gleichtaktstörungen zu unterdrücken, kann jedoch die Gerätegröße erhöhen und sich negativ auf Differenzsignale auswirken.
-
Gegentaktimpedanz:sollte möglichst niedrig sein (<10Ω), um eine Verzerrung der CAN-Signalflanken zu vermeiden.
-
Gleichstromwiderstand (DCR): muss <1Ω sein. Ein zu hoher DCR verringert den Gleichtaktspannungshub am Bus und verringert so die Anzahl der anschließbaren Knoten.
-
Nennstrom: >200 mA und muss größer sein als der maximale Übergangs- oder Dauerstrom auf dem Bus.
-
Isolationsspannungsfestigkeit:≥1000 Vrms, um die Anforderungen an die Systemisolation zu erfüllen.
4.3 Rolle in der CAN-Kommunikation
-
Unterdrückt Gleichtakt-Störstrahlungen von externen Umgebungen (z. B. Motoren, Schaltnetzteile) und verbessert so die EMV-Leistung.
-
Reduziert Gleichtaktrauschen, das vom Buskabel abgestrahlt wird, das als Antenne fungiert, und trägt so dazu bei, Tests zur elektromagnetischen Interferenz (EMI) zu bestehen.
-
Arbeitet mit Abschlusswiderständen und TVS zusammen, um ein vollständiges Busimmunitätsnetzwerk aufzubauen.
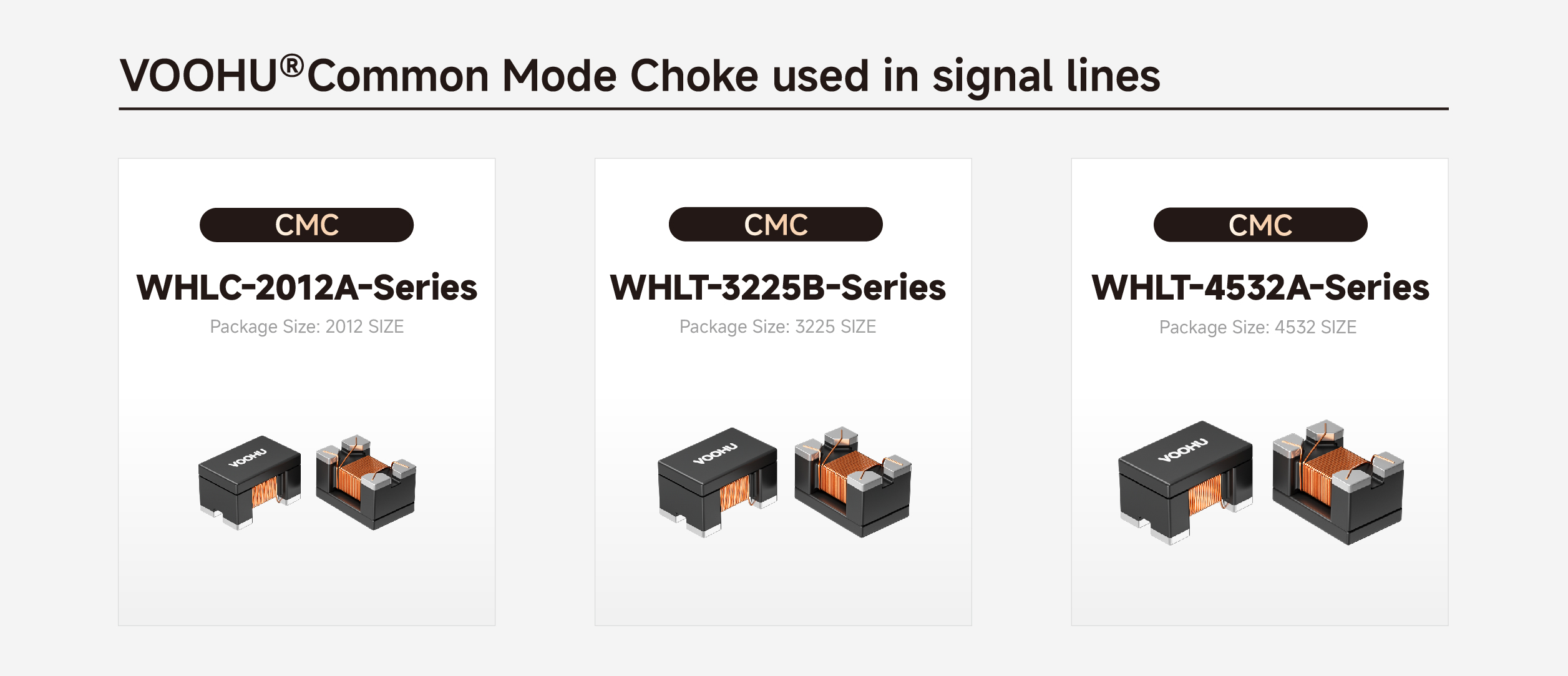
4.4 Empfohlene Gleichtaktdrosseln für die CAN-Kommunikation
VOOHU-Signalleitungs-Gleichtaktdrosselnsind für den CAN-Bus optimiert und erfüllen die Anforderungen an einen niedrigen DCR, eine niedrige Gegentaktimpedanz und eine hohe Gleichtaktunterdrückung.
-
Serie 2012 (z. B. WHLC-2012A-900T0): 90 Ω bei 100 MHz, 0,35 Ω, 300 mA – geeignet für kompakte CAN-Knoten.
-
Serie 3225 (z. B. WHAC-3225B-110U0): 550 Ω bei 100 MHz, 0,8 Ω, 300 mA – allgemeine Industrie-/Automobil-CAN-Knoten.
-
Serie 4532 (z. B. WHAC-4532A-220U0): 1200 Ω bei 100 MHz, 1,4 Ω, 200 mA – für Umgebungen mit hohen Interferenzen in der Nähe von Motoren und Wechselrichtern.
5. Abschlusswiderstand
Der CAN-Bus verwendet als Übertragungsmedium ein Twisted-Pair-Kabel mit einer charakteristischen Impedanz von typischerweise 120 Ω. Wenn ein Signal das Ende des Busses erreicht, führt eine Impedanzfehlanpassung zu Reflexionen, die zu Signalschwingungen und Überschwingern und damit zu Bitfehlern führen.
Der Abschlusswiderstand wird zwischen CAN_H und CAN_L angeschlossen, mit einem Wert, der der charakteristischen Impedanz des Kabels entspricht. Es absorbiert reflektierte Energie und unterdrückt stehende Wellen. Es wird hauptsächlich zur Beseitigung von Reflexionen und zur Bereitstellung eines DC-Lastpfads verwendet, um die Signalintegrität sicherzustellen.
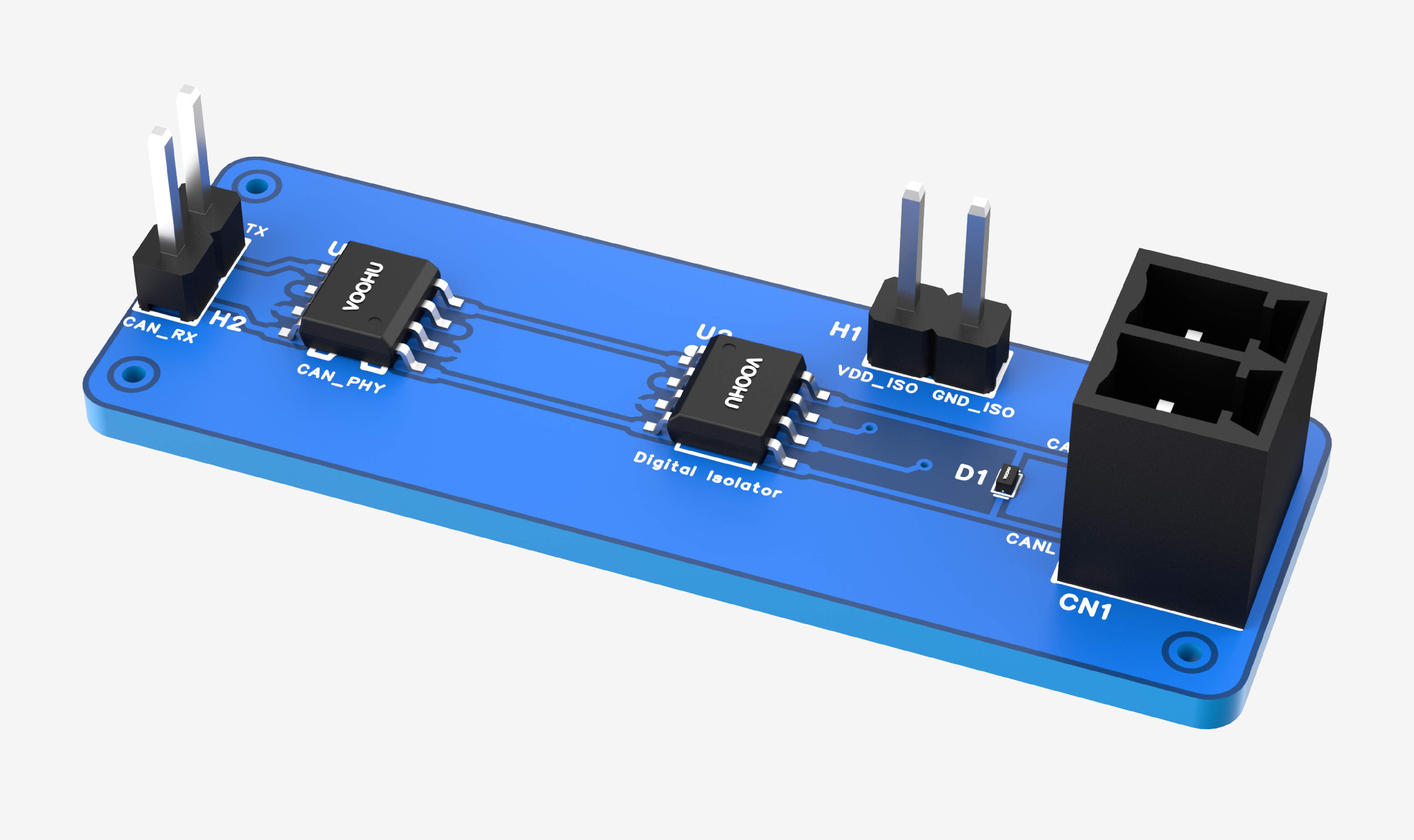
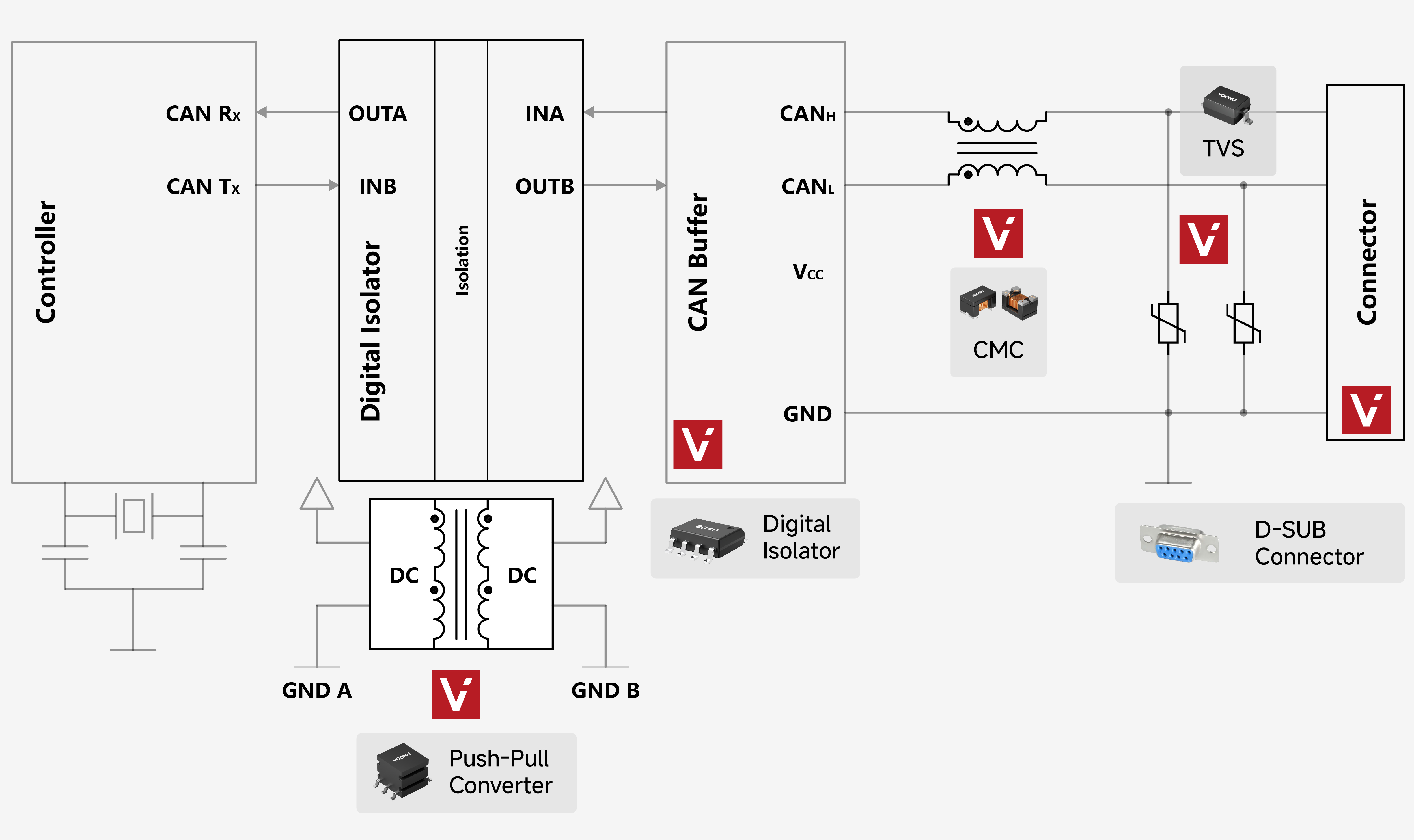
6. Vollständiger Schaltungsentwurf
Durch die Kombination der oben genannten Module ist ein typischer hochzuverlässiger isolierter CAN-Kommunikationsschaltkreis wie folgt aufgebaut:
Layoutprinzipien:
-
Platzieren Sie Isolator und Transceiver so nah wie möglich, um die digitalen Signalspuren auf der Sekundärseite zu verkürzen.
-
Halten Sie die Leiterbahnen von den Transceiver-Bus-Pins zum Anschluss differenziell, symmetrisch und gleich lang, mit einer Impedanz von etwa 120 Ω.
-
Primärseite (Controllerseite): Das System versorgt mit 3,3 V oder 5 V direkt die MCU, die Primärseite des Isolators und andere Niederspannungslogik.
-
Sekundärseite (Busseite): Verwenden Sie ein isoliertes Push-Pull-Netzteil zur Erzeugung von 5V_ISO, das für den Transceiver-VCC und die Sekundärseite des Isolators bestimmt ist.
-
Masseebenen: Primärer GND und sekundärer GND_ISO sind vollständig isoliert. Verbinden Sie sie über einen 1-MΩ-Widerstand parallel zu einem 10-nF-Hochspannungskondensator mit der Gehäuseerde (oder der Schutzerde PE), um statische Elektrizität abzuleiten und einen hochfrequenten Rauschpfad bereitzustellen, der eine schwebende Potenzialansammlung verhindert.
Häufig gestellte Fragen
F1: Warum benötigt der CAN-Bus Abschlusswiderstände? Wie wähle ich den Wert aus?
A1: Abschlusswiderstände passen sich der charakteristischen Impedanz des Kabels an, absorbieren Signalreflexionen und verhindern Überschwingen und Überschwingen. Der Standard-CAN-Bus verwendet Twisted-Pair-Kabel mit einer charakteristischen Impedanz von 120 Ω, daher sollte der Abschlusswiderstand 120 Ω betragen und zwischen CAN_H und CAN_L angeschlossen sein. Normalerweise wird an jedem Ende des Busses ein 120-Ω-Widerstand platziert.
F2: Welche Rolle spielt eine Gleichtaktdrossel im CAN-Bus? Welche Parameter sollten bei der Auswahl berücksichtigt werden?
A2: Die Gleichtaktdrossel unterdrückt externe Gleichtaktstörungen (z. B. von Motoren, Schaltnetzteilen) und Gleichtaktstrahlung vom Buskabel und hilft so, die EMV-Prüfung zu bestehen. Wichtige Auswahlparameter: Gleichtaktinduktivität (51 μH ~ 100 μH bei 100 kHz), Gegentaktimpedanz (<10 Ω), Gleichstromwiderstand (<1 Ω), Nennstrom (>200 mA), Isolationsspannungsfestigkeit (≥1000 Vrms). VOOHU bietet Signalleitungs-Gleichtaktdrosseln der Serien 2012/3225/4532 an, die diese Anforderungen erfüllen.
F3: Wie entwirft man die CAN-Bus-Schutzschaltung? Wo sollten TVS-Dioden platziert werden?
A3: Die Schutzschaltung muss ESD-, EFT- und Load-Dump-Überspannungen unterdrücken. TVS-Dioden sollten zuerst zwischen CAN_H und CAN_L und dann von jeder Leitung zur Erde platziert werden. Anordnung: Platzieren Sie das TVS so nah wie möglich am Busanschluss oder den Transceiver-Pins, mit kurzen und breiten Leiterbahnen.
F4: Warum wird in einem isolierten CAN-Schaltkreis ein digitaler Isolator benötigt? Wie gestaltet man die isolierte Stromversorgung?
A4: Ein digitaler Isolator unterbricht die Masseschleife und das Gleichtaktrauschen zwischen der Steuerung und dem Bus und verhindert so, dass ein Fehler auf der isolierten Seite die MCU der Steuerung beschädigt. Für die isolierte Stromversorgung kann ein isolierter Push-Pull-Transformator verwendet werden, um 5 V_ISO zu erzeugen, der für den VCC des Transceivers und die Sekundärseite des Isolators bestimmt ist. VOOHU bietet Gegentakttransformatoren wie WHST06D02A0 an, die zusammen mit dem Isolator eine vollständige Isolationslösung bilden.
F5: Wie erfolgt die gemeinsame Auswahl von CAN-Transceiver, Isolator und Gleichtaktdrossel?
A5: Wählen Sie zunächst einen CAN-Transceiver (z. B. SIT1042, 1051 usw.) basierend auf Datenrate und Knotenanzahl aus. Wenn eine Isolierung erforderlich ist, wählen Sie einen integrierten isolierten Transceiver oder eine diskrete „Isolator + Transceiver“-Lösung. Platzieren Sie eine Gleichtaktdrossel (Serie VOOHU 3225 oder 4532) in der Nähe des Busanschlusses, um Gleichtaktstörungen zu filtern, und schließen Sie zum Schutz vor Überspannungen ein TVS parallel an. Stellen Sie außerdem 120-Ω-Abschlusswiderstände bereit. VOOHU kann ein komplettes CAN-Schnittstellengerätepaket bereitstellen, einschließlich Gleichtaktdrosseln, TVS, Gegentakttransformatoren und Steckverbindern, mit Unterstützung für das Design von Referenzschaltungen.
Von der Gründung im Jahr 2018 bis zur Expansion ins Ausland im Jahr 2026 hat sich VOOHU Electronics aufgrund „hervorragender Qualität, fairer Preise, aufmerksamem Service und zuverlässiger Lieferung“ zu einem zuverlässigen Partner für mehr als 1.000 Unternehmen entwickelt.
Wenn Sie auch nach einem Lieferanten elektronischer Telekommunikationskomponenten suchen, der Ihnen Sorgen, Geld und Mühe erspart, warum versuchen Sie es dann nicht mit VOOHU? Schließlich kann die Wahl der über 100 börsennotierten Unternehmen nicht falsch sein.
*Wählen Sie VOOHU – wirklich zuverlässig. Das ist nicht nur ein Slogan; Es ist eine Antwort, die auf der Grundlage des Vertrauens von mehr als 1.000 Kunden über einen Zeitraum von 9 Jahren verfasst wurde.
![[FAQ] Three FAQs for integrated RJ45 (Mag-Jack) application](/upload/image/20260724/fd7e9c7a96b2d92065dbdd6aff0b38b3.jpg)